In sfarsit am reusit sa-mi fac timp sa trec actionarile sub blat !
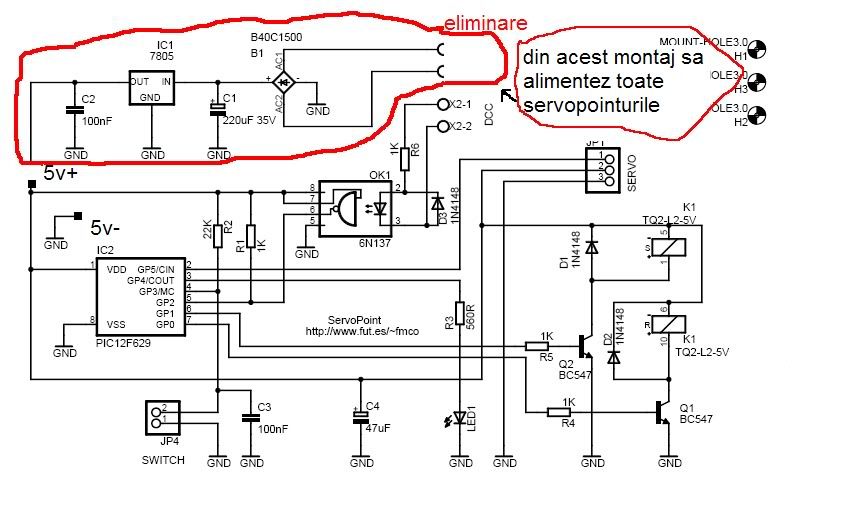
Ma decisesem in cele din urma pt. actionari cu servo-uri, comandate in digital de servopoint-ul lui Paco. Problema mare era partea mecanica, ce trebuia sa obtina o cursa liniara de 3mm, pornind de la o rotatie unghiulara a bratului servo-ului. In plus vroiam o miscare a acelor cat mai aproape de realitate (durata ~ 3 sec.)
Aveam nevoie asadar de un unghi de rotatie a bratului servo-ului de 90-100??° (un unghi mai mic ar fi insemnat fie o durata mai mica, fie necesitatea scaderii vitezei de rotatie din softul servopoint-ului, care ar fi dus la sacadarea miscarii)
Mai mult, actionarea trebuie sa fie si elastica, pt. a asigura mentinerea acelor la capetele cursei si in plus, sa poata prelua socul de initializare a servo-ului.
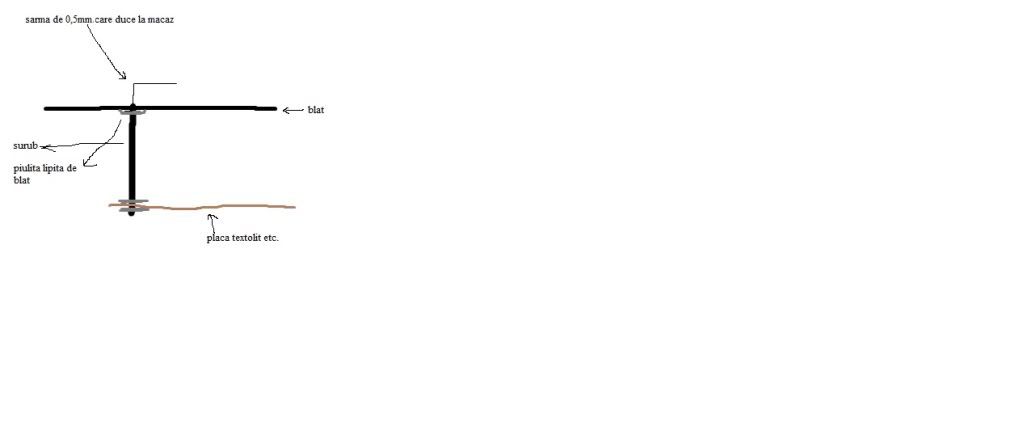
Pt. traversarea blatului am folosit tija filetata de 3mm, perforata la capatul superior unde am fixat cu o piulita o parghie de 15mm lungime facuta din coarda de chitara de 0,4mm.


Am urmarit ca ansamblul sa nu depaseasca nivelul sinei, intrucat exista material rulant cu garda extrem de joasa (vezi macaraua Roco).


Sub blat, am fixat de tija filetata o parghie de cablaj de 45mm lungime; am transformat astfel cursa de 3mm a acelor in una de 9mm. Aceasta corespunde deplasarii celui mai mic brat al servoului, la o rotatie de 90-100??°.


Legatura brat servo - parghie este facuta din sarma de 0,8mm (agrafa de birou) care poate fi indoita usor pt. reglarea fina a pozitiei de zero (mijlocul cursei); reglajul amplitudinii cursei facandu-sa din soft.
Desi Paco spune ca reglajul de "range" este intre 1 - 50, pt. unghiul de 100??° am setat valoarea 70 fara nici o problema.
In ciuda aparentelor, intregul montaj este surprinzator de robust si precis in pozitionarea acelor. In plus, sistemul de parghii reduce drastic si socul initierii servo-ului la o miscare de nici 0,5mm.
Iata si un filmulet: http://www.youtube.com/watch?v=oL1ssMj3CZo
Ma decisesem in cele din urma pt. actionari cu servo-uri, comandate in digital de servopoint-ul lui Paco. Problema mare era partea mecanica, ce trebuia sa obtina o cursa liniara de 3mm, pornind de la o rotatie unghiulara a bratului servo-ului. In plus vroiam o miscare a acelor cat mai aproape de realitate (durata ~ 3 sec.)
Aveam nevoie asadar de un unghi de rotatie a bratului servo-ului de 90-100??° (un unghi mai mic ar fi insemnat fie o durata mai mica, fie necesitatea scaderii vitezei de rotatie din softul servopoint-ului, care ar fi dus la sacadarea miscarii)
Mai mult, actionarea trebuie sa fie si elastica, pt. a asigura mentinerea acelor la capetele cursei si in plus, sa poata prelua socul de initializare a servo-ului.
Pt. traversarea blatului am folosit tija filetata de 3mm, perforata la capatul superior unde am fixat cu o piulita o parghie de 15mm lungime facuta din coarda de chitara de 0,4mm.


Am urmarit ca ansamblul sa nu depaseasca nivelul sinei, intrucat exista material rulant cu garda extrem de joasa (vezi macaraua Roco).


Sub blat, am fixat de tija filetata o parghie de cablaj de 45mm lungime; am transformat astfel cursa de 3mm a acelor in una de 9mm. Aceasta corespunde deplasarii celui mai mic brat al servoului, la o rotatie de 90-100??°.


Legatura brat servo - parghie este facuta din sarma de 0,8mm (agrafa de birou) care poate fi indoita usor pt. reglarea fina a pozitiei de zero (mijlocul cursei); reglajul amplitudinii cursei facandu-sa din soft.
Desi Paco spune ca reglajul de "range" este intre 1 - 50, pt. unghiul de 100??° am setat valoarea 70 fara nici o problema.
In ciuda aparentelor, intregul montaj este surprinzator de robust si precis in pozitionarea acelor. In plus, sistemul de parghii reduce drastic si socul initierii servo-ului la o miscare de nici 0,5mm.
Iata si un filmulet: http://www.youtube.com/watch?v=oL1ssMj3CZo
 )
)